本文介绍ROS2中话题和服务的内容。并配合示例代码来实践以便加深理解。
安装依赖
安装相应的工具:
colcon 编译工具安装
1 | sudo apt install python3-colcon-common-extensions git |
设置colcon_cd,方便用colcon_cd 包名 快速打开到包的目录。需要在工作空间目录下使用,其他路径下使用会出现卡住的情况。
1 | echo "source /usr/share/colcon_cd/function/colcon_cd.sh" >> ~/.bashrc |
设置colcon参数自动补全功能
1 | echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> ~/.bashrc |
ROS2参数自动补全工具(zsh不支持ROS2参数自动补全,bash可以)
1 | sudo apt-get install python3-argcomplete |
会用到的几个命令:
编译整个工作空间
1 | colcon build --symlink-install |
编译单个功能包(包名需要是package.xml文件中name标签中的名字)
1 | colcon build --symlink-install --packages-select 包名 |

source环境
1 | #source ros2 系统层环境变量 |
创建功能包
1 | ros2 pkg create test_pkg --node-name test_cpp --dependencies rclcpp std_msgs |
运行节点
1 | ros2 run 包名 执行文件名 |
安装ros包的命令
1 | sudo apt-get install ros-<distro>-<package> |
ROS2 命令行工具速查表,请在公众号《首飞》中回复“cli”获取。
ROS2 工作空间
工作空间用于存放ros功能包。
ROS2系统工作空间
目录如下:
1 | /opt/ros/galactic/ |
用命令安装的ros功能包都会在这个目录下。
1 | source /opt/ros/galactic/setup.bash |
source 该路径下的setup.bash可以获取ROS2系统维护的环境变量。相当于告诉电脑在哪里去找对应的工具和执行文件。比如ros2的命令行工具。
ROS2用户工作空间
例如:~/galactic_ws
创建用户工作空间
1 | mkdir -p galactic_ws/src |
实际上就是创建一系列的目录。ros功能包统一放到src目录下。
ROS2节点
一个节点只实现一个单独的功能(模块化)。实现节点功能的代码会组织成一个功能包(package)。
下面是一个典型的机器人系统框架图。
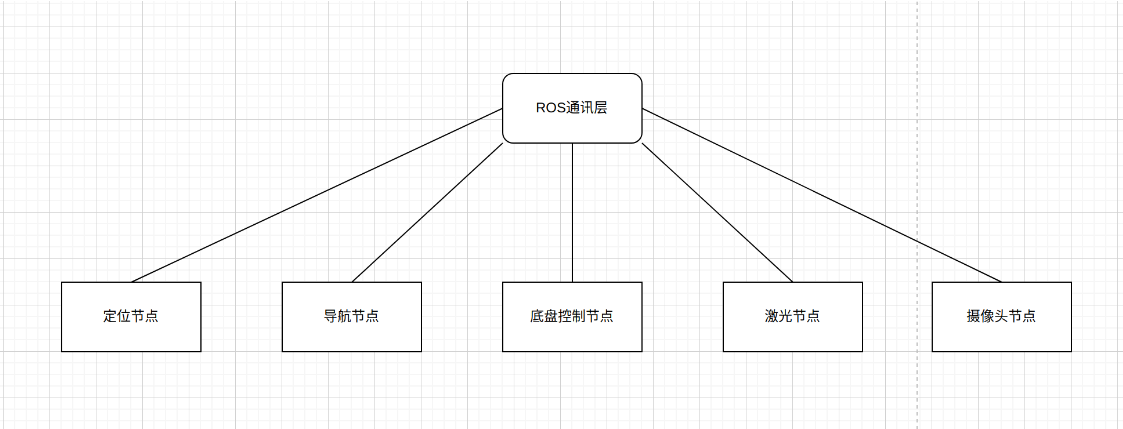
一个工作空间下可以有多个功能包,一个功能包可以有多个节点存在
创建ROS2功能包
在src目录下运行下面命令,创建一个包名为test_pkg,执行文件为test_cpp,并且依赖rclcpp std_msgs等功能包的ROS2功能包。
1 | ros2 pkg create test_pkg --node-name test_cpp --dependencies rclcpp std_msgs |
安装tree命令
1 | sudo apt-get install tree |
在galactic_ws下运行tree查看生成了哪里文件。
在galactic_ws下运行code . 查看生成的文件内容。
编译ROS2功能包
在galactic_ws目录下运行
1 | colcon build --symlink-install |
--symlink-install 指对于解释性的代码,如python,修改了源码后无需编译即可生效。ros2 run 会执行修改后的内容。因为安装文件是相应源码文件的软链接。对于编译性的源码则无效。比如修改C++源码后需要重新编译才能生效。
在galactic_ws下运行tree ,查看多了哪些文件。
编译命令的参考资料
https://docs.ros.org/en/galactic/Tutorials/Colcon-Tutorial.html
https://colcon.readthedocs.io/en/released/user/installation.html
运行ROS2节点
1 | source install/setup.bash |
可以看到打印了hello world。
下载示例代码
在galactic_ws工作空间下的src目录下运行下面命令获取示例代码。
1 | git clone https://gitee.com/shoufei/ros2_galactic_turorials.git |
按照仓库的readme.md文件进行编译
节点间的通讯
有下面4种方式:
话题-topics
服务-services
动作-Action
参数-parameters
本篇文章讲前两个:话题和服务。
看到这里需要提醒一下,如果已经按照上面的说明编译好了示例代码,下面就可以试着运行一下下面的示例程序看看效果了。
话题-topics
话题概念 (参考官方文档)
https://docs.ros.org/en/galactic/Tutorials/Topics/Understanding-ROS2-Topics.html
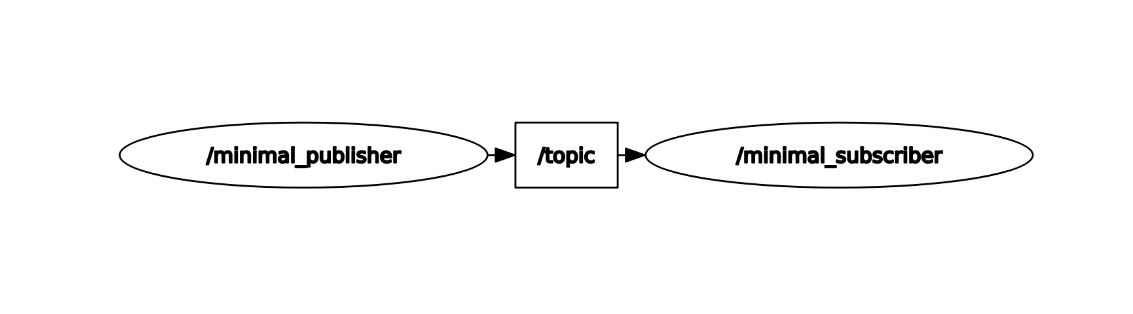
话题通讯接口是发布和订阅模型。一个节点程序里可以有多个发布器,也可以有多个接受器。发布器数据时,只管发布不管谁会接受。同理,接收器接收数据时,也只管接收对于的数据,不管到底是谁发的。那它们怎么对应起来呢?主要是通过数据的名称(即话题名称)来对应起来。
运行话题示例
运行订阅话题的节点
1 | ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function |
运行发布话题的节点
1 | ros2 run examples_rclcpp_minimal_publisher publisher_member_function |
查看节点图
1 | rqt |
下面的路径里可以查看ROS2系统已经定义好的标准消息类型:
1 | /opt/ros/galactic/include/std_msgs/msg |
他们是一系列自动生成的文件。
自定义话题消息类型
https://docs.ros.org/en/galactic/Tutorials/Custom-ROS2-Interfaces.html
自定义消息类型和自定义一个C++的结构体很像。但使用的类型需要是之前已经定义好的。
运行示例
1 | ros2 run examples_rclcpp_minimal_publisher publisher_member_function_with_custom_msg |
定义发布器和订阅器的示例
1 | vel_cmd_publisher_ = this->create_publisher<geometry_msgs::msg::Twist>("turtle1/cmd_vel", 1); |
服务-services
服务概念 (参考官方文档)
https://docs.ros.org/en/galactic/Tutorials/Services/Understanding-ROS2-Services.html
可以通过rqt中的service caller插件来发送服务请求。
运行服务示例
运行服务端的节点
1 | ros2 run examples_rclcpp_minimal_service service_main |
运行客户端的节点
1 | ros2 run examples_rclcpp_minimal_client client_main |
在下面的路径下可以查看ROS2系统定义的服务类型
1 | /opt/ros/galactic/include/std_srvs/srv |
自定义服务类型
https://docs.ros.org/en/galactic/Tutorials/Custom-ROS2-Interfaces.html
运行示例
1 | ros2 run examples_rclcpp_minimal_service service_main_custom_srv |
创建服务的示例
1 | server_ = this->create_service<TurtleCmdMode>("change_turtle_control_mode", |
来张图总结一下

自定义消息和服务的注意事项:
- 消息和服务文件中,变量名需要是小写的,写成大写不能编译过。
- 消息和服务文件的命名需要是每个单词开头字母为大写。如下所示:
1 | SensorData.msg |
- 编译成功后,使用时需要包含对应接口的头文件。头文件的形式为:
1 | #include <包名/msg/sensor_data.hpp> |
注意与消息或服务文件名字的对应关系。
觉得有用就点赞吧!
我是首飞,一个帮大家填坑的机器人开发攻城狮。
另外在公众号《首飞》内回复“机器人”获取精心推荐的C/C++,Python,Docker,Qt,ROS1/2等机器人行业常用技术资料。
